C++编译器优化
x64寄存器模型
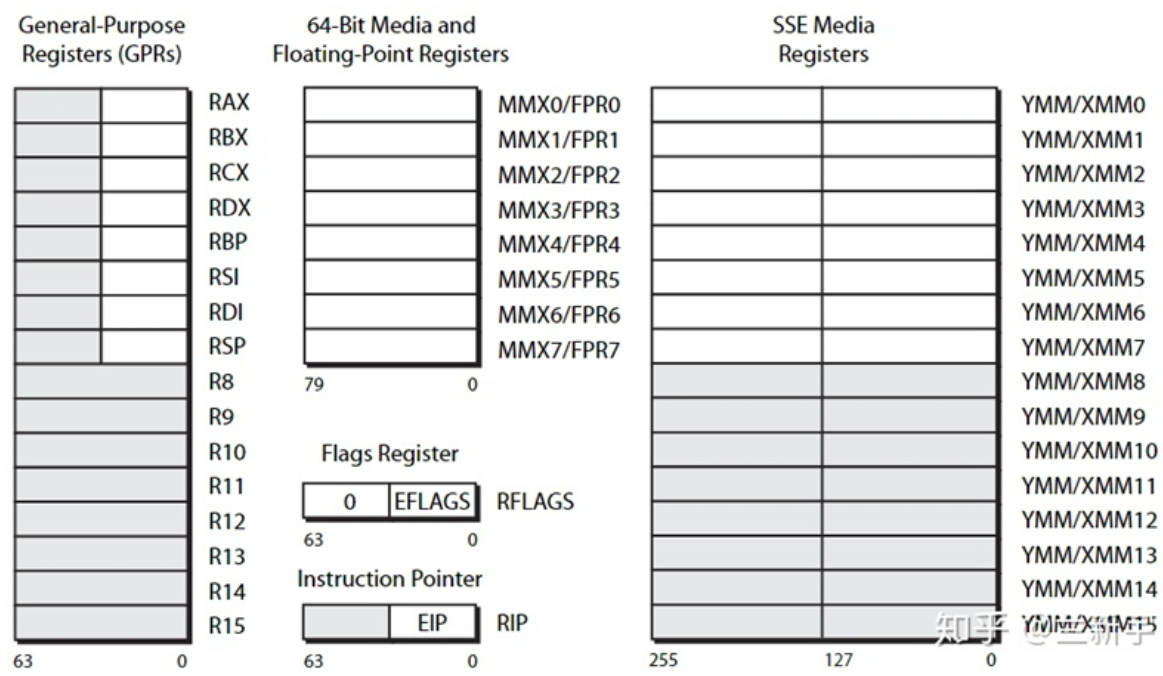
32 位 x86 架构中的通用寄存器有:eax, ecx, edx, ebx, esi, edi, esp, ebp
其中 esp 是堆栈指针寄存器,和函数的调用与返回相关。 eax 是用于保存返回值的寄存器。
64 位 x86 架构中的通用寄存器有:rax, rcx, rdx, rbx, rsi, rdi, rsp, rbp, r8, r9, r10, r11, ..., r15
其中 r8 到 r15 是 64 位 x86 新增的寄存器,给了汇编程序员更大的空间,降低了编译器处理寄存器翻车(register spill)的压力。
64 位比 32 位机器相比,除了内存突破 4GB 限制外,也有一定性能优势。
汇编语言
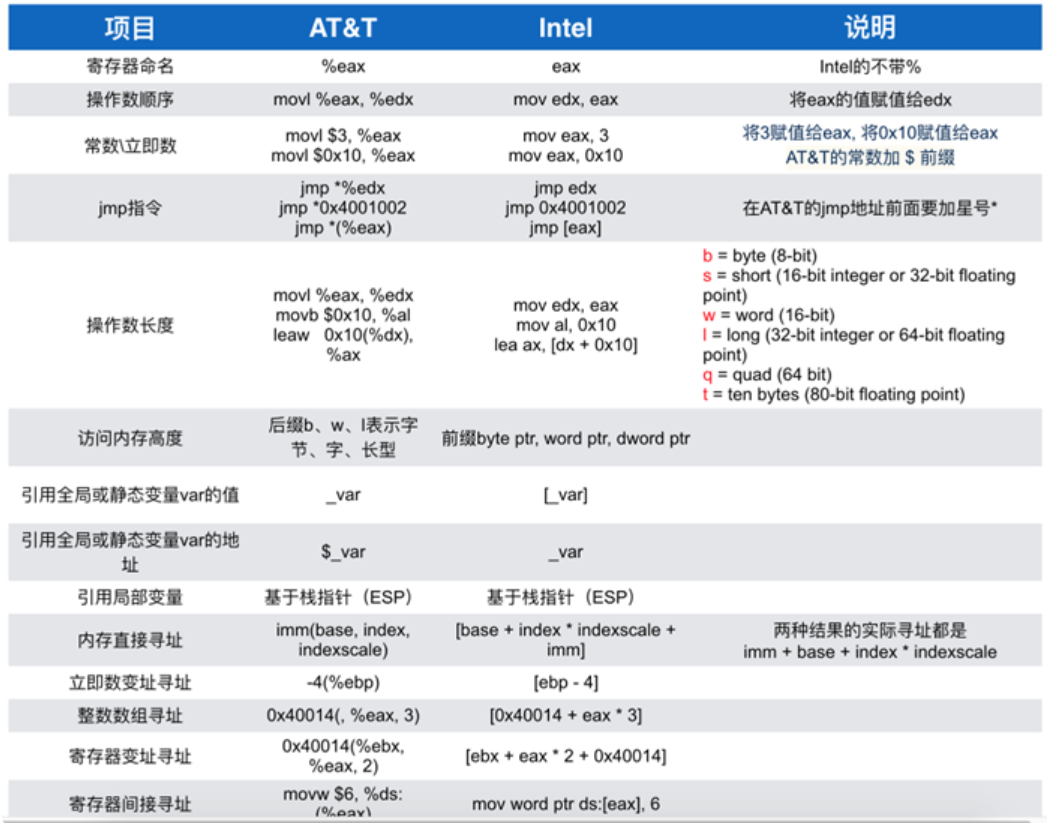
GCC 编译器所生成的汇编语言属于AT&T系列。
1 | |
使用 -O3 (Release级别)查看编译器优化后的汇编程序。
1 | |
lea
lea 是加载表达式的地址,相当于&。
1 | |
相当于
1 | |
线性地址访问优化
movslq 部分将32位寄存器扩展到64位,再进行访存计算。
优化建议:
指针的索引尽量用 size_t 类型。
不需要用 movslq 从 32 位符号扩展到 64 位,更高效。而且也能处理数组大小超过 INT_MAX 的情况。
推荐始终用 size_t 表示数组大小和索引。
浮点寄存器
浮点作为参数和返回使用 xmm 系列寄存器。
xmm 寄存器有 128 位宽。可以容纳 4 个 float,或 2 个 double。
对于浮点数寄存器操作指令,有特殊的指令形式。比如加法:
1 | |
- add 表示执行加法操作。
- 第一个 s 表示标量(scalar),只对 xmm 的最低位进行运算;也可以是 p 表示矢量(packed),一次对 xmm 中所有位进行运算。(单个指令处理多个数据的技术称为 SIMD(single-instruction multiple-data))
- 第二个 s 表示单精度浮点数(single),即 float 类型;也可以是 d 表示双精度浮点数(double),即 double 类型。
即:
addss:一个 float 加法。 addsd:一个 double 加法。 addps:四个 float 加法。 addpd:两个 double 加法。
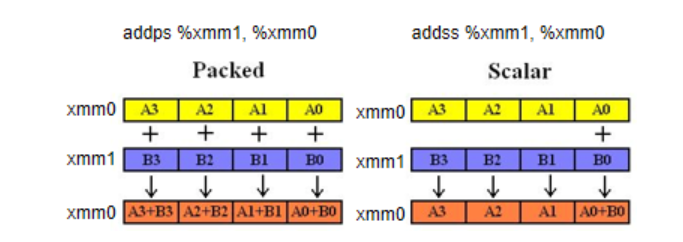
编译器生成的汇编里,有大量 ss 结尾的指令则说明矢量化失败;如果大多数都是 ps 结尾则说明矢量化成功。
SIMD
single-instruction multiple-data 可以大大增加计算密集型程序的吞吐量。
通常认为利用同时处理 4 个 float 的 SIMD 指令可以加速 4 倍。
但是如果你的算法不适合 SIMD,则可能加速达不到 4 倍;也可能因为 SIMD 让访问内存更有规律,节约了指令解码和指令缓存的压力等原因,出现加速超过 4 倍的情况。
编译器优化
对于简单的代数运算,编译器可以帮助优化计算,直接返回结果。
但是前提是:1. 代码简单;2. 代码不涉及动态内存分配。
代码过于复杂,涉及的语句数量过多时,编译器会放弃优化。
简单的代码,比什么优化手段都强。
堆上的容器
存储在堆上(妨碍优化):
- vector, map, set, string, function, any
- unique_ptr, shared_ptr, weak_ptr
存储在栈上(利于优化):
- array, bitset, glm::vec, string_view
- pair, tuple, optional, variant
constexpr
如果发现编译器放弃了自动优化,可以用 constexpr 函数迫使编译器进行常量折叠,但是会让编译变得很慢。
不过,constexpr 函数中无法使用非 constexpr 的容器:vector, map, set, string 等。
函数内联
如果函数的实现和声明分离,在调用时,被称为调用外部函数。调用时,链接器会通过 PLT 函数链接表,在其他 .o 文件中查找函数的定义。
如果函数实现就在调用的同一个文件中,称为内部函数。此时会直接调用,而不是通过链接器,减轻了链接器的负担。
只有定义在同一个文件的函数可以被内联。
为了效率我们可以尽量把常用函数定义在头文件里,然后声明为 static。这样调用他们的时候编译器看得到他们的函数体,从而有机会内联。
当编译器看得到被调用函数实现的时候,会直接把函数实现贴到调用他的函数里,实现函数内联。
inline 关键字
在现代编译器的高强度优化下,加不加 inline 无所谓。只要他看得见 other 的函数体定义,就会自动内联。
内联与否和 inline 没关系,内联与否只取决于是否在同文件,且函数体够小。
想要性能,定义在头文件声明为 static 即可,没必要加 inline 的。static 纯粹是为了避免多个 .cpp 引用同一个头文件造成冲突,并不是内联必需的。
可以实验测试,在线做编译器实验:https://godbolt.org/。
指针优化
1 | |
为什么编译器不优化掉 c = a?
因为 b 和 c 可能指向同一个变量。
优化前相当于:b = a; b = b; 最后 b 变成了 a。
如果优化了:b = b; 最后 b 没有改变。
这种情况叫做 pointer aliasing。
__restrict
__restrict 是一个提示性的关键字,是程序员向编译器保证:这些指针之间不会发生重叠 (pointer aliasing),从而可以放心地优化。
实际上,__restrict 只需要加在所有具有写入访问的指针上,就可以优化成功。即只需加在非 const 参数之前即可。
因为只读的变量,随便几个指针指向它无所谓。
volatile
加了 volatile 的对象,编译器会放弃优化对他的读写操作。做性能实验的时候非常有用。
volatile 在 * 前面而,__restrict 在 * 后面。
volatile 是禁用优化,__restrict 是帮助优化。
restrict 是 C99 标准关键字,但不是 C++ 标准的关键字。__restrict 其实是编译器的“私货”,不在C++标准中,好在大多数主流编译器都支持。
矢量化
合并写入
编译器可以将两个 int32 的写入合并为一个 int64 的写入。但如果访问的两个元素地址间有跳跃,就不能合并了。
不管是编译器还是 CPU,都喜欢顺序的连续访问。
两个 int32 可以合并为一个 int64。四个 int32 可以合并为一个 __m128。
八个 int32 可以合并为一个 __m256。
xmm0 由 SSE 引入,是个 128 位寄存器。他可以一次存储 4 个 int,或 4 个 float。
如果硬件支持AVX指令集,还可以使用 256 位的 ymm0 寄存器。gcc -march=native 让编译器自动判断当前硬件支持的指令。
编译器会使用 SIMD 指令进行优化。
数组清零
编译器会自动分析你是在做拷贝或是清零,并优化成对标准库这俩的调用。
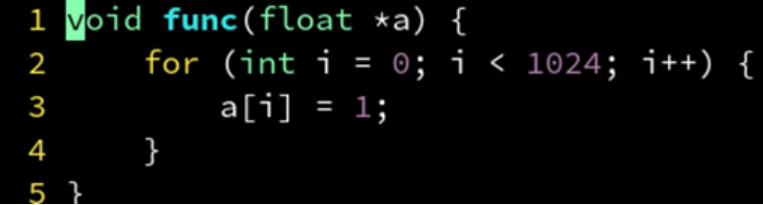
数组循环赋值
1 | |
n 如果是 4 的倍数,使用SIMD指令一次写入 4 个 int。
如果 n 不是 4 的倍数,将能被4整除的部分使用SIMD,剩余边界部分,每次处理 1 个。
如果能保证指针 a 总是对齐到 16 字节,在 GCC 编译器中这样写:
1 | |
C++20 引入了标准化的 std::assume_aligned
1 | |
数组重叠
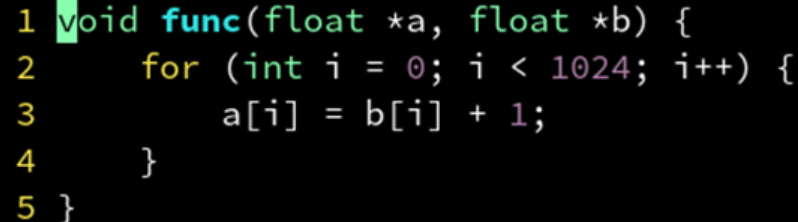
在运行时检测 a, b 指针的差是否超过 1024 来判断是否有重叠现象。
如果没有重叠,则跳转到 SIMD 版本高效运行。
如果重叠,则跳转到标量版本低效运行,但至少不会错。
编译器编译两个版本的代码,ps结尾指令为矢量化指令,ss结尾指令为标量化指令:
__restrict 关键字可以加以优化:
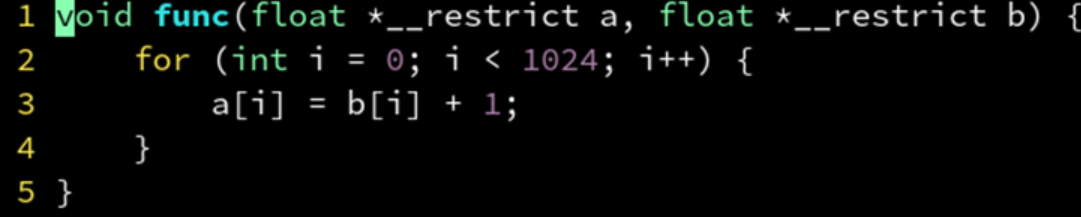
只需要生成一个 SIMD 版本了,没有了运行时判断重叠的焦虑。
或者,使用 OpenMP :
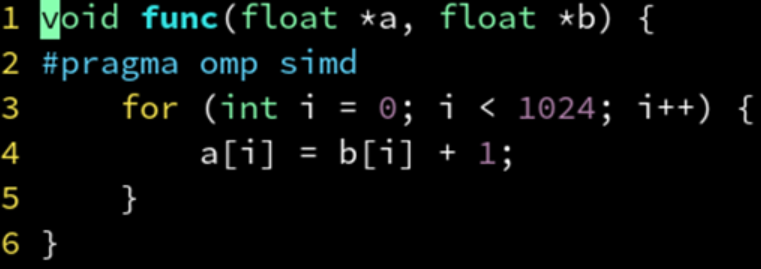
来迫使编译器无视指针别名的问题,并启用 SIMD 优化。编译参数设置为 gcc -fopenmp。
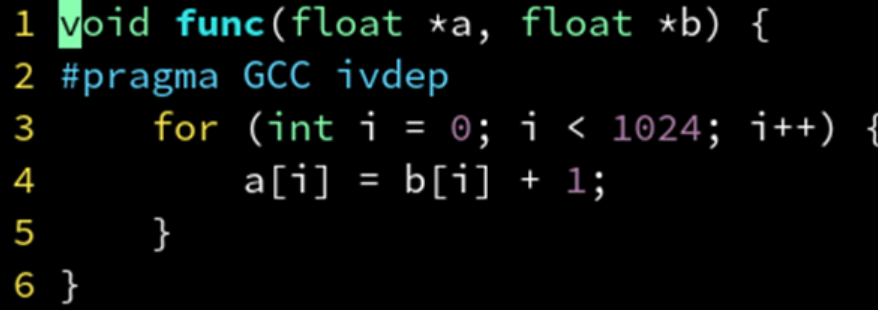
gcc 也提供了相似的编译指令:
循环中的if
有 if 分支的循环体是难以 SIMD 矢量化的。
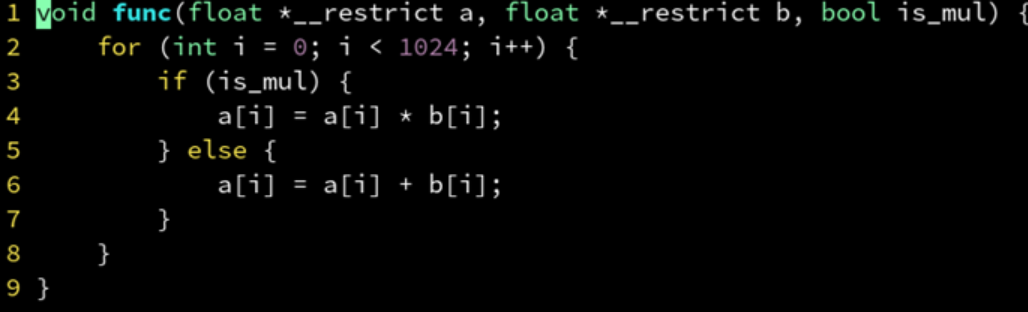
在编译器看来,is_mul 是一个常量,于是把 if 分支判断挪到了 for 外面来。
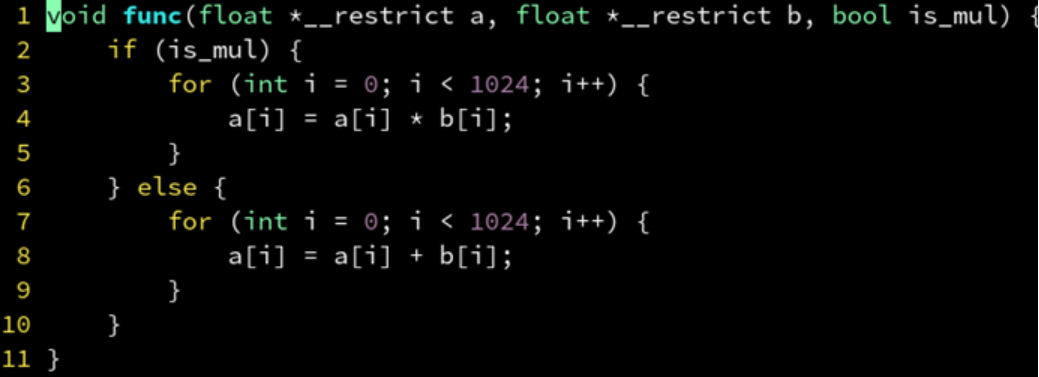
这样就可以使用 SIMD 指令。这一优化过程,编译器可以自动进行。
循环中的不变量

dt * dt 和当前 i 无关,因此可以移到循环体外,提前计算,避免重复计算。

在使用了 (dt * dt)条件下,编译器可以自动优化,但是只要去掉 (dt * dt) 的括号就会优化失败。因为乘法是左结合的,就相当于 (b[i] * dt) * dt 编译器识别不到不变量,从而优化失败。
要么帮编译器打上括号帮助他识别,要么手动提取不变量到循环体外。
循环中的外部函数
避免在 for 循环体里调用外部函数,把他们移到同一个文件里,或者放在头文件声明为 static 函数。这样编译器能看到调用函数的函数体,才能进行内联优化。
循环展开
每次执行循环体 a[i] = 1后,都要进行一次判断 i < 1024。导致一部分时间花在判断是否结束循环,而不是循环体里。
对于 GCC 编译器,可以用 #pragma GCC unroll 4 表示把循环体展开为4个,相当于:
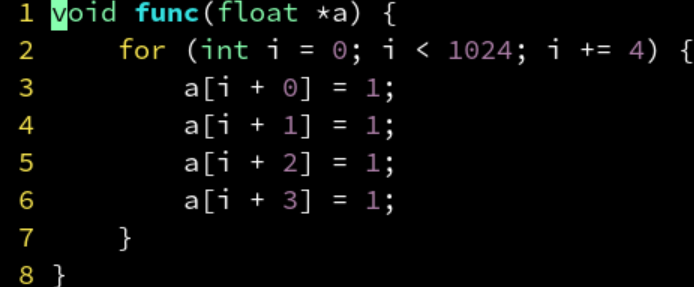
但是不建议手动这样写,会妨碍编译器的 SIMD 矢量化。
对小的循环体进行 unroll 可能是划算的,但最好不要 unroll 大的循环体,否则会造成指令缓存的压力反而变慢!
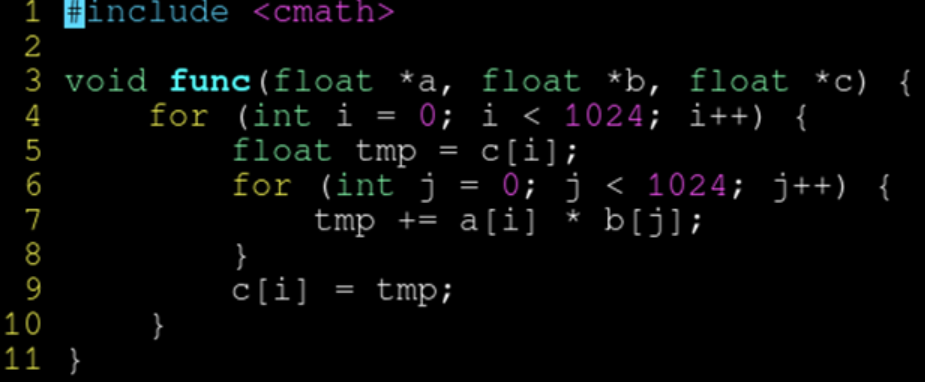
嵌套循环
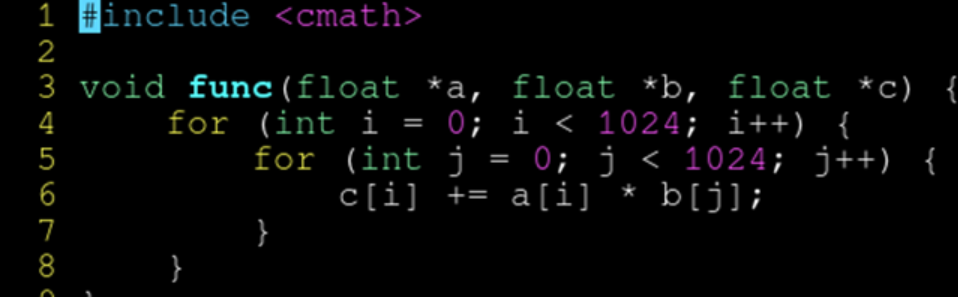
编译器担心 c 和 a 可能会指向同一个地址,而连续判断三个指针是否有重合又过于复杂,放弃了矢量化。
- 解决方案1:先读到局部变量,累加完毕后,再写入
编译器认为不存在指针别名的问题,矢量化成功。
- 解决方案2:先累加到初始为 0 的局部变量,再累加到 c
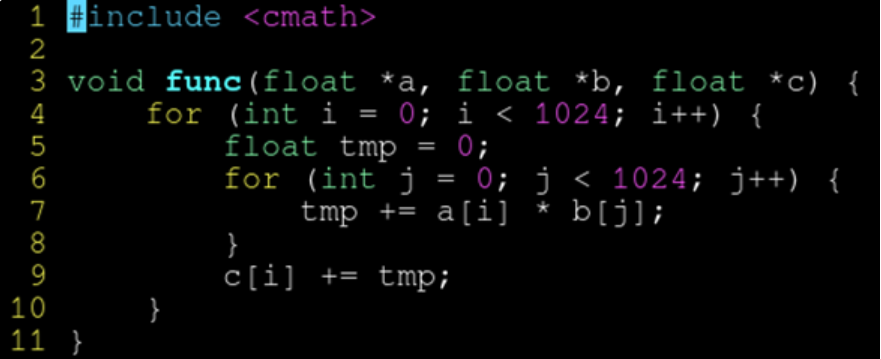
该解决方案比起前一种,由于加法顺序原因,算出来的浮点精度更高,c[i] 后面可能很大了。
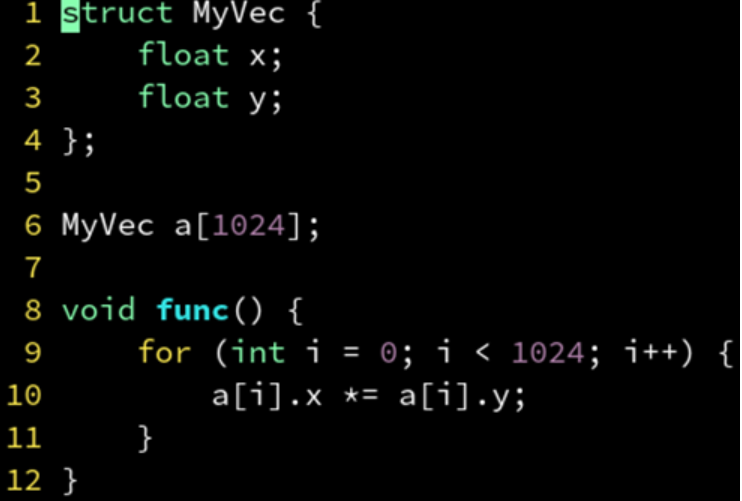
结构体
结构体对齐会影响到矢量化。
两个 float 的结构体,对齐到 8 字节,可以成功 SIMD 矢量化。
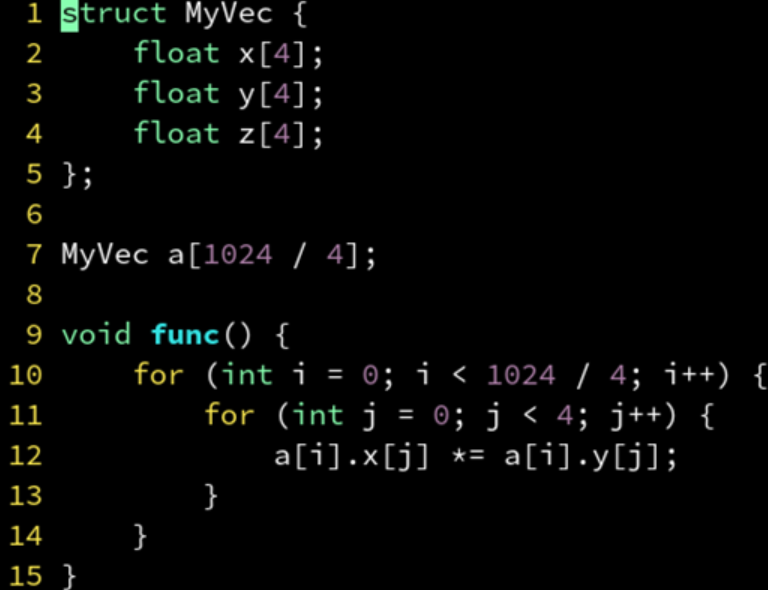
三个 float 的结构体,对齐到 12 字节,矢量化失败。
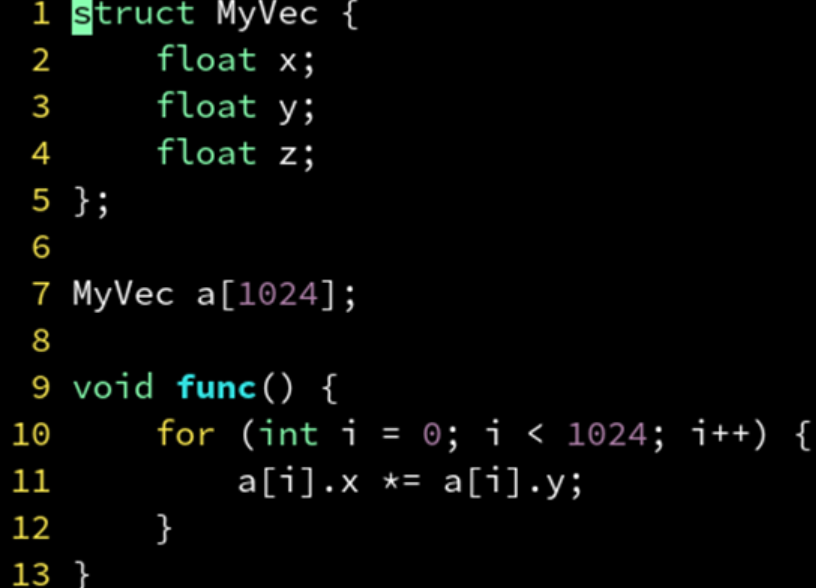
追加了一个没有用的 4 字节变量,整个结构体变成 16 字节大小。
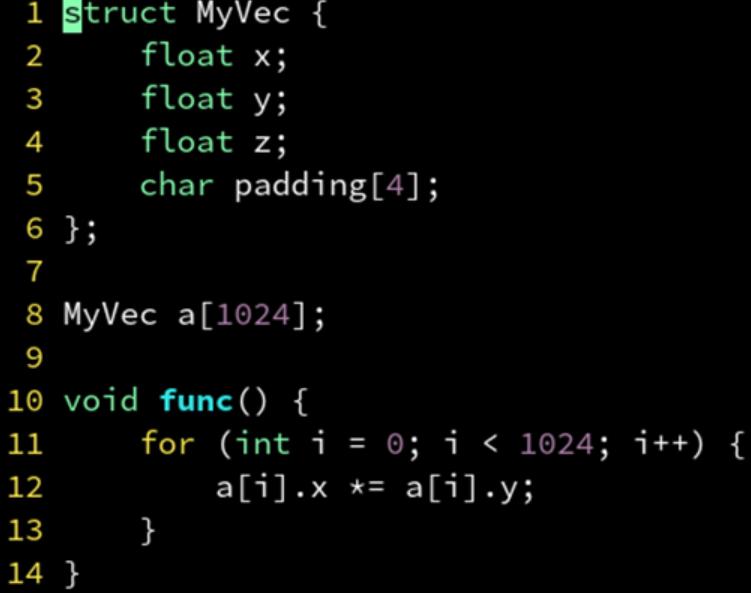
矢量化反而成功。
计算机喜欢 2 的整数幂,2, 4, 8, 16, 32, 64, 128...。结构体大小若不是 2 的整数幂,往往会导致 SIMD 优化失败。
alignas
C++11 的新语法。在 struct 后加上 alignas(要对齐到的字节数) 即可实现同样效果,就不需要手动写 padding 变量了。
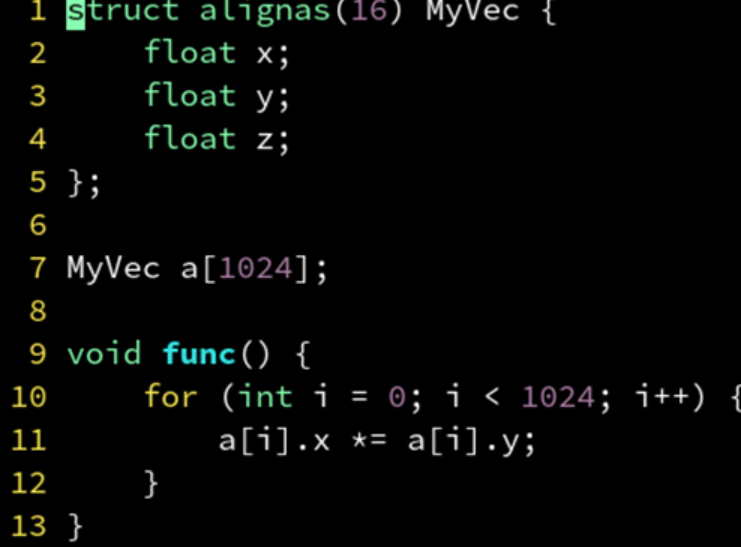
但是这种padding策略,也有可能不仅不变快,反而还变慢。SIMD 和缓存行对齐只是性能优化的一个点,又不是全部。还要考虑结构体变大会导致内存带宽的占用,对缓存的占用等一系列连锁反应,总之,要根据实际情况选择优化方案。
AOS 与 SOA
AOS(Array of Struct)单个对象的属性紧挨着存。SOA(Struct of Array)属性分离存储在多个数组。
AOS 必须对齐到 2 的幂才高效,SOA 就不需要。SOA 不符合直觉,但通常是更高效的。
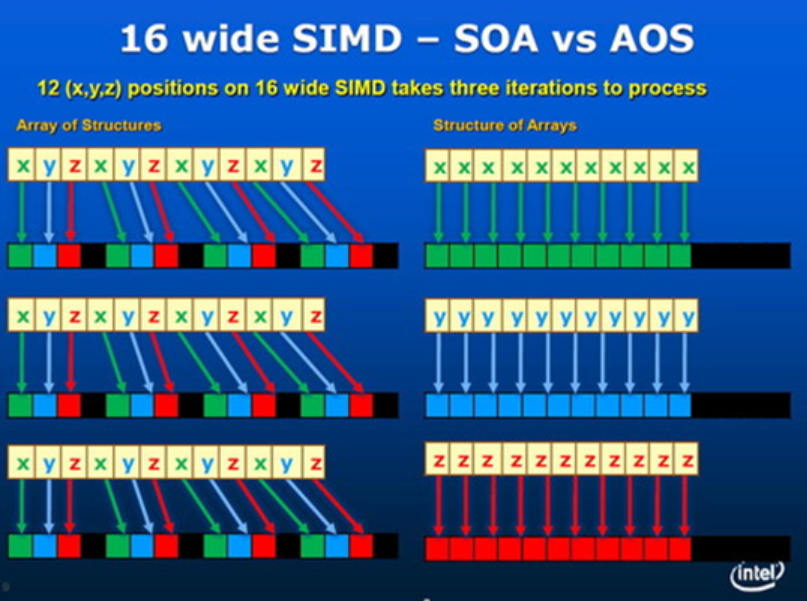
SOA:分离存储多个属性。不符合面向对象编程 (OOP) 的习惯,但常常有利于性能。又称之为面向数据编程 (DOP)。
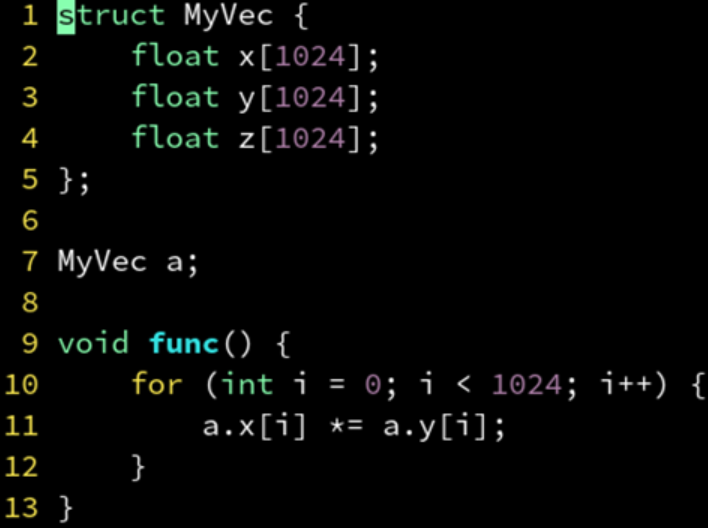
成功 SIMD 矢量化。
AOSOA
4 个对象一组打包成 SOA,再用一个 n / 4 大小的数组存储为 AOS。
优点:SOA 便于 SIMD 优化;AOS 便于存储在传统容器;AOSOA 两者得兼。
缺点:需要两层 for 循环,不利于随机访问;需要数组大小是 4 的整数倍,不过可以用边界特判法(单独处理不能矢量化部分)解决。
Benchmark
aos
1 | |
aos_aligned
1 | |
aos_parallel
1 | |
aosoa
1 | |
soa
1 | |
soa_size_t
1 | |
soa_simd
1 | |
soa_unroll
1 | |
soa_parallel
1 | |
测试
1 | |
结果
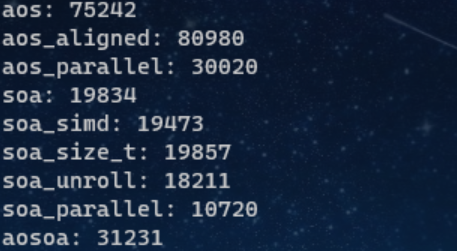
单线程的 SOA + unroll 甚至略微超过了并行版的 AOS。OpenMP 并非万能,单线程的程序认真优化后一样打败无脑并行。
性能还和array大小 N 有关。
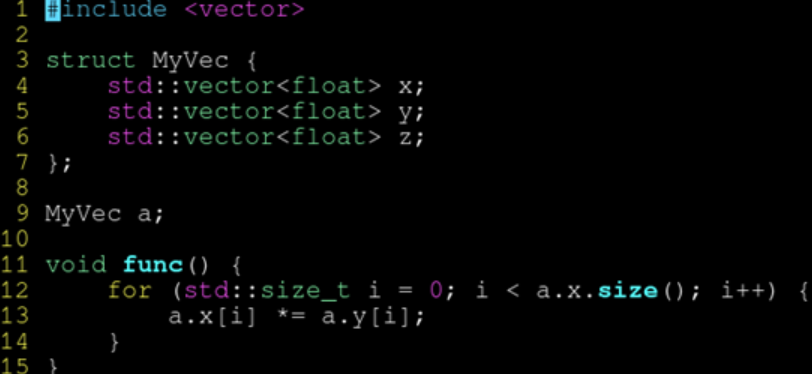
std::vector
使用 pragma omp simd 或 pragma GCC ivdep 可以解决 vector 的 pointer aliasing 问题。
另外,使用 std::vector 也可以实现 SOA,不过,请保证 vector 是同样大小。
C++数学运算优化
除法变乘法
1 | |
汇编变为mul乘法,* 0.5f。
但是以下程序却没有优化:
1 | |
因为编译器害怕 b = 0。
乘法比除法更快,所以可以提前计算好 b 的倒数避免重复求除法。
1 | |
-ffast-math
-ffast-math 选项让 GCC 更大胆地尝试浮点运算的优化,有时能带来 2 倍左右的提升。作为代价,他对 NaN 和无穷大的处理。
如果你能保证,程序中永远不会出现 NaN 和无穷大,那么可以放心打开 -ffast-math。
数学函数请加 std:: 前缀
sqrt 只接受 double sqrtf 只接受 float std::sqrt 重载了 double 和 float(推荐)
abs 只接受 int fabs 只接受 double fabsf 只接受 float std::abs 重载了 int, double, float(推荐)
请勿用全局的数学函数,他们是 C 语言的遗产。始终用 std::sin, std::pow 等。
小结
- 函数尽量写在同一个文件内
- 避免在 for 循环内调用外部函数
- 非 const 指针加上 __restrict 修饰
- 试着用 SOA 取代 AOS
- 对齐到 16 或 64 字节
- 简单的代码,不要复杂化
- 试试看 #pragma omp simd
- 循环中不变的常量挪到外面来
- 对小循环体用 #pragma unroll
- -ffast-math 和 -march=native
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!